GUSTAVO PÉREZ
Machine Learning Researcher (Computer Vision & Statistical ML)
Expert in large-scale image analysis, uncertainty estimation, and AI for real-world decision systems
ABOUT ME
I am a machine learning researcher specializing in computer vision and statistical modeling for large-scale visual data. I recently completed a postdoctoral appointment at UC Berkeley (BAIR) , where I worked with Stella Yu and Miki Lustig .
My work focuses on developing scalable and data-efficient methods for analyzing complex datasets under real-world constraints, including limited annotations and noisy data. I have developed machine learning systems across multiple domains, including ecology (radar data), astronomy (HST/JWST imaging), medical imaging (MRI), and materials science.
During my PhD at UMass Amherst, I developed DISCount , an importance sampling framework for scalable visual counting, which received the AAAI 2024 Best Paper Award (AI for Social Impact) and is now used for large-scale ecological monitoring.
More broadly, I am interested in building machine learning systems that combine statistical rigor, scalability, and real-world impact.
Research interests
My research focuses on:
- Large-scale visual data analysis
- Uncertainty-aware and data-efficient machine learning
- Human-in-the-loop learning systems
- Applications of machine learning to scientific and real-world data
I am particularly interested in problems where combining statistical modeling and machine learning enables reliable decision-making under limited or noisy data.
Research overview
I work on interdisciplinary problems across multiple domains, including:
- Ecology: analyzing long-term radar data to study animal populations and environmental change
- Astronomy: identifying and characterizing star clusters from HST and JWST imagery
- Medical Imaging: motion correction and signal analysis in MRI
- Materials Science: predicting properties of nanoporous materials using deep learning
These projects share a common goal: enabling scalable and data-efficient analysis of complex real-world datasets.
Links
SELECTED RESEARCH
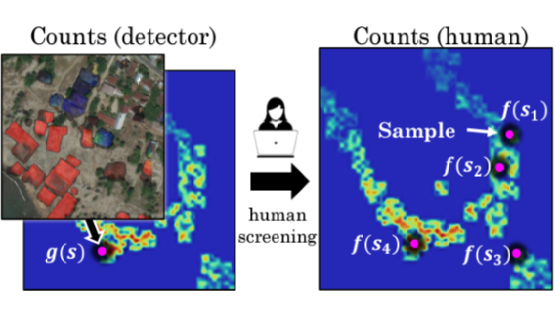
DISCOUNT—Counting in Large Image CollectionsWe contribute counting methods for large image collections where images are freely available and it is possible to train a detector to run on all images, but the detector is not reliable enough for the final counting task, or its reliability is unknown.Github code repository · paper · press release |
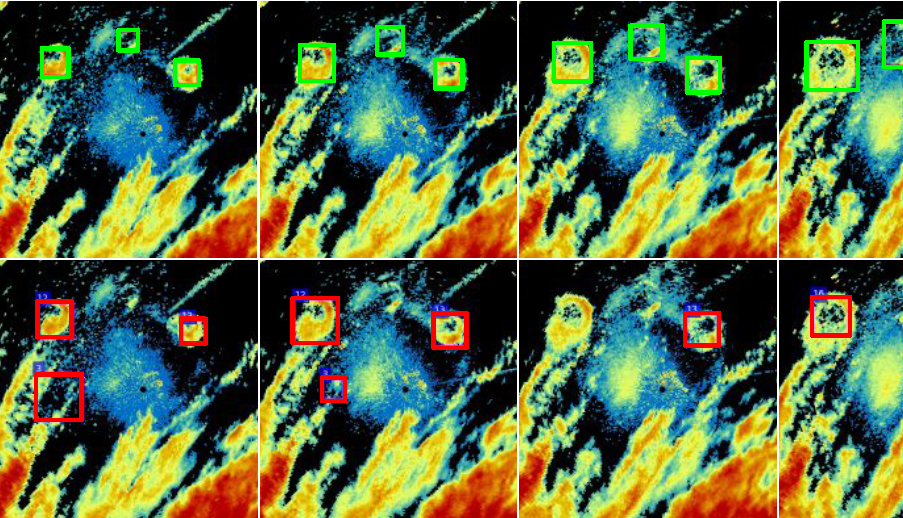
AI FOR ECOLOGY—Insectivore Response to Environmental ChangeRoost detection from weather radar data to investigate the behavior of three aerial insectivore species as bellwethers for environmental change and ecosystem health: Purple Martin, Tree Swallow, and Mexican free-tailed BatGithub code repository · preprint |
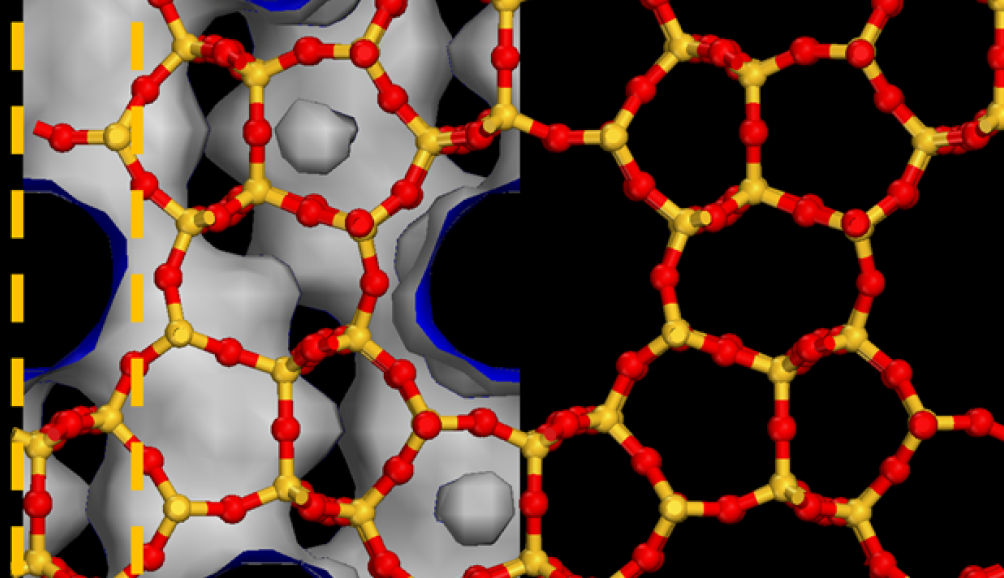
AI FOR SUSTAINABILITY—Deep learning of nanoporous materials for energy-efficient chemical separationsWe present ZeoNet, a representation learning framework using convolutional neural networks and 3D volumetric representations for predicting adsorption in zeolitesGithub code repository · paper · press release |
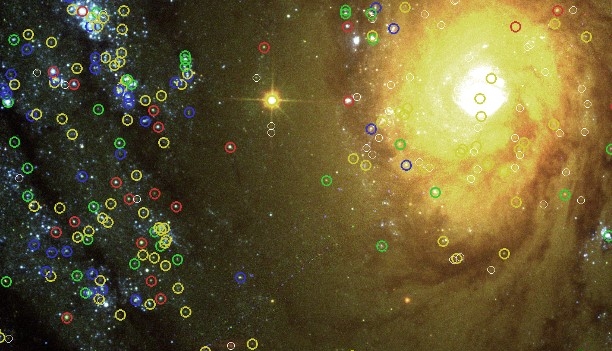
AI FOR ASTRONOMY—Star cluster classification from nearby galaxiesIn this work we focus on an ecosystem of AI tools for cataloging bright sources within nearby galaxies, and use them to analyze young star clusters.Github code repository · paper |
MISC
I'm also a photography enthusiast. → Some of my photos .